 A Dashcam video has been doing the rounds on Social Media, showing the driver of a Jeep driving on the R30 between Bothaville and Odendaalsrus on Friday, 20 May 2022, in darkness. The video shows the time to be 05h26 and the vehicle to be driving at a speed of 100Km/h.
A Dashcam video has been doing the rounds on Social Media, showing the driver of a Jeep driving on the R30 between Bothaville and Odendaalsrus on Friday, 20 May 2022, in darkness. The video shows the time to be 05h26 and the vehicle to be driving at a speed of 100Km/h.
The next minute, a literal heap of sand thrown across the width of the road is lit up by the headlights of the vehicle. As the vehicle hits the heap of sand, ramps up, and rolls over, you immediately realise that the driver had no chance. You also notice that there were no warnings and no way to see that sand heap until it is too late. Close analysis reveals that the sand heap is visible for no more than about 1.5 seconds before impact.
Almost immediately some sources reported that the sand was placed on the road to ambush the vehicle, for some evildoers to rob the occupants, or worse. The comments in the posts under the video we saw painted another picture, however. According to the comments, the road was closed by the local authorities after that section of it was flooded. While this may very well be the case, the absence of any warnings or signage is of very great concern. Even as some comments asserted that “everyone knows the road is closed,” there is simply no way this can be considered factual.
While I will not explore the reasons for the sand, the closure of roads, or the absence of signage without having accurate first-hand information, I have some thoughts on the incident, prompted by comments I received as I shared the news.
Speeding and Sight Distance
The first argument was that “he should not have been driving so fast.” This begs the question: What is too fast, and – considering all possible hazards, including those that would be completely unforeseeable – how slow would you then actually need to drive at night, to be “totally safe?” Is there a “golden number?”
Let’s start with the most important aspect when trying to answer this question: Sight distance. You cannot react to something you cannot see. For me to consider my risk, I need to be aware of my limitations. I cannot see what I cannot see. So let’s look at the elements that prevail in the video and consider how they would impact my ability to see objects on the road (my human capacity to sense an object).
Your capacity to see is directly impacted by visibility. Visibility is, in simple terms, determined by the amount of light entering through the iris in the eye, and striking the retina. Your ability to effectively see – to sense – that light, is affected by several factors, which include:
- Light frequency – The light must be in the visible spectrum. We cannot see or sense light in infrared or ultraviolet spectrums.
- Light intensity – The light must be bright (intense) enough for it to activate an observer’s light receptors in our eyes. The lower the light levels, the harder it becomes to detect.
- Light quality – If the light is coherent (think of a laser beam), it has an impact of greater intensity on the light receptors in our eyes. Because of this, special laws have been written to allow for the criminal prosecution of anyone who shines a laser pointer into the eyes of pilots – even from miles away.
- Light colour – Due to the makeup and design of our eyes, we sense certain colours of lights – like red – more easily than others – like deeper blue hues.
- Glare – If you watch this video, you will see that there is a bright light visible in the distance. It is an approaching vehicle, and it had its high beams (brights) on initially, and switches to low-beam (dim) less than a second before the sandhill is hit. As the video starts, the driver is also driving on a high beam. The high-beam lights are bright and shine across the full width of the road, and above it, due to the headlight design (see below). But the driver obviously sees the approaching vehicle and switches to low-beam almost 14 seconds before he hits the sandbank.
Let’s quickly consider the design of the headlamps of vehicles, before we proceed.
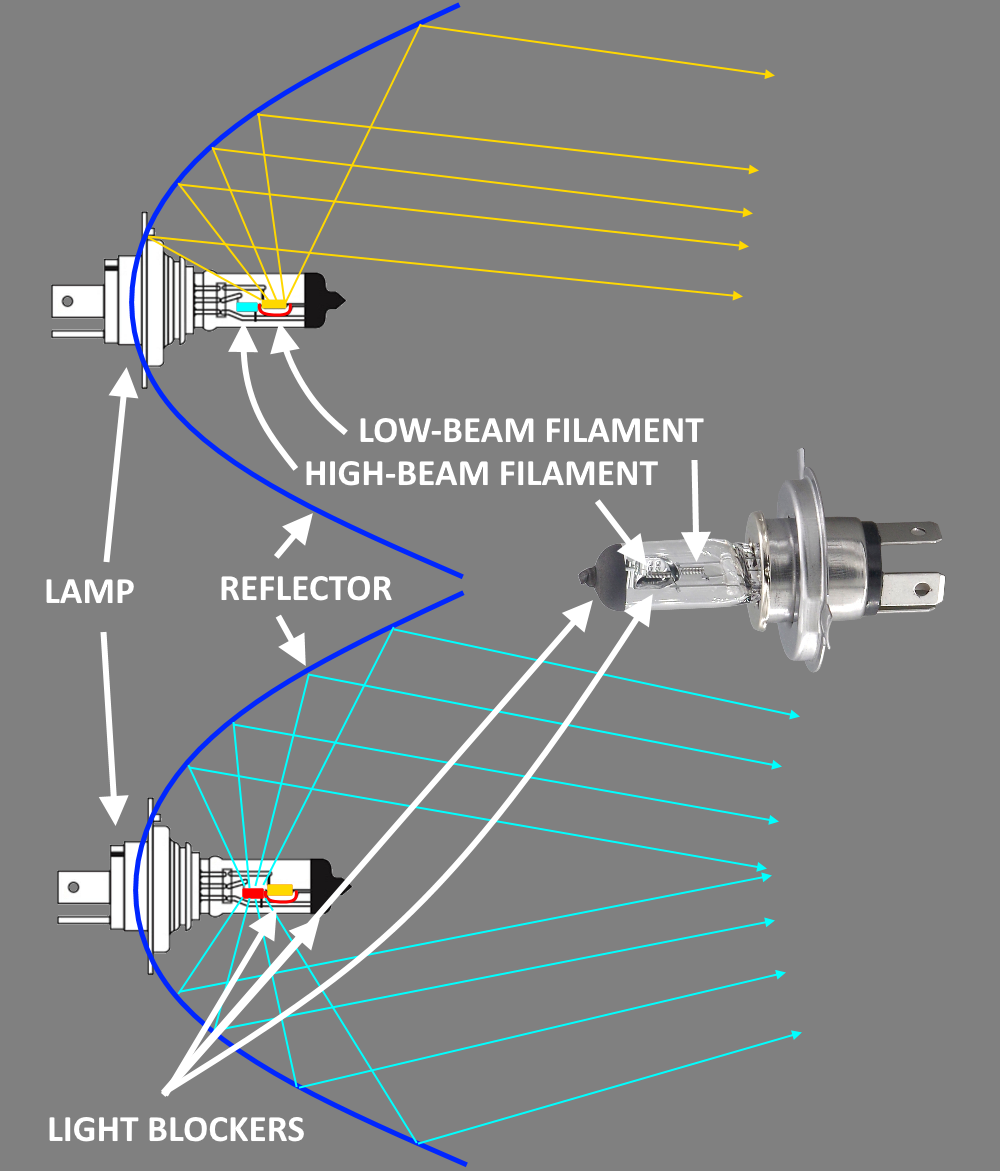
In this illustration, the top sketch shows a low-beam condition and the bottom one a high-beam condition.
The lamp has a glass casing, is filled with inert gas, and has two filaments (high-beam, and low-beam) that can be energized to create light. The high beam is of a higher wattage than the low beam, making it brighter.
On the front of the lamp, there is a section that is covered in a special resin to block direct light and there is a little metal cup under the low-beam filament to block some light, as well.
Since vehicle headlamps are typically inside reflectors, the lamp design and the reflector are designed to “shape the light beam” being projected forward, ahead of the vehicle.
This results in only the “top half” of the reflector projecting light, towards the front and downwards a bit, to ensure that approaching drivers are not blinded when the low beam is activated.
When a high beam is activated, however, more light is generated and all the light is allowed to reflect forwards, even upwards slightly. This causes glare for approaching vehicles.
Back to the video
Night driving on a blocked road
With the driver robbed of “half of the light from his headlights,” when he switches to low beam, we need to ask “how far will they shine?”
The Road Traffic of South Africa addresses this in Regulations 160 and 161.
On low beams (or dipped beams) it is rather specific and technical, but about how far a light should shine, it basically says that the light emitted by a low beam headlight should slant downwards at a percentage inclination of at least 0.5%, calculated with the following formula:
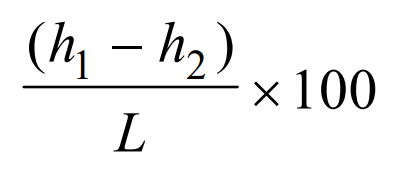
Without getting too technical, it concludes by stating that the centre of the intense part of such beam shall slant downwards to strike the road surface ahead of the motor vehicle within a distance not exceeding 45 meters.
This means that the headlights, on low beam, should shine at a point about 45m ahead of your vehicle, but it is also not allowed to blind any approaching drivers.
Regarding high beams (or main beams) it states it shall be capable of adequately illuminating an area ahead of the motor vehicle concerned enabling the driver to see any person, vehicle, or substantial object at a distance of at least 100 meters ahead.
This means that you should be able to see any person, vehicle, or substantial object from a distance of at least 100m, exactly as it states. However, the regulation completely ignores any of the issues we’ve discussed, the is mute on whether this applies to a moving or stationary vehicle, and it disregards the shape, colour, and reflectivity of the “substantial object” in question.
This brings us to the next part of this discussion: The properties of light, and how we perceive it.
How well we can see is also influenced by several aspects:
- Precipitation (or weather) – The Act makes no mention of whether those measurements would apply when there is heavy rain, fog, or even smoke. Those conditions would obviously matter.
- Eyesight Acuity – The Road Traffic Act ignores the effects of glare when you wear spectacles or if you have not gotten spectacles yet but suffer from deteriorated eyesight in any event.
- Medical Condition – We know that many medical conditions, from Diabetes to Glaucoma can negatively impact eyesight.
- Age – As people get older, they often suffer from “night blindness” as the elasticity in their iris is reduced. As they are exposed to glare, they take longer to see properly again, when the source of glare has passed.

But it doesn’t end here. That “vehicle, person, or substantial object” the Act refers to is not properly defined. Obviously, you can see a reflective sign or even a mirror from a much greater distance, with much lower light levels than you could a black cow or a matte black car with no lights on.
I find it specifically interesting that the Act actually acknowledges the value of reflective materials (some regulations demand their use), but ignores the opposite in this aspect. If your lights are on low-beam (shining towards the ground), and a black cow is crossing the road, you would simply not be able to actually see it until you are much closer than you would a reflective road sign.
But now that we know that not all things are equal as far as visibility is concerned – what about your reaction time.
So, considering all these “challenges” to seeing properly (and I don’t mean simply “seeing” for the sake of being able to see), how slow would you have to go to be able to “stop in time?”
As if this “problem” isn’t complex enough yet, we now have to consider perception-reaction times or PRT. While the research of Greene, Leaner, et al postulated some PRT times of between 1.5 and 2.5 seconds, they include a disclaimer that states that their results cannot be used for crash analysis. Then there are reports and research by Joseph Badger and Jeffrey Muttart that offer possible PRT values, under more real-life conditions, of up to several seconds!
The fact is that the mechanisms of Perception Reaction are complex in their own right! During those claimed “PRT” Times, inconsiderate of the one you favour or agree with, the following cognitive steps need to be achieved:
Perception
You must actually look. If you look at your speed, you are not looking at the road. If you look at what you think might be something of interest, you cannot also look at what is important, necessarily, at the same time. Your ability to perceive is heavily impacted by your inability to practically multitask as you are faced with a variety of driver duties, ranging from watching the road to watching your speed, operating your lights and indicators, looking for dangers behind you, carefully watching vehicles joining from your sides, etc.
Detection
Whether you look, or not, you need to be able to detect a threat or object. This can be affected by the light quality, glare, light colour, contrast, movement, size, a change in size, and many more dynamics that can conspire to reduce your abilities.
Identification
You cannot slam on the brakes for every object you detect, swerve for every pedestrian, or see every car as a danger. You need to actually process what you detected, decide on the risk it might, or does, present, and positively decide what it is you have just detected. This takes time, and you might even experience “suspension of belief” if you see something that you never expected at all – like a heap of sand in the middle of a road, without any warning.
Risk Analysis
When you are done “processing” what you have detected and decided what it is you are looking at, you also need to decide whether it is a risk to you – is there any danger? The degree of risk also needs to be analyzed and some predictions should take place. Take the scenario of a pedestrian approaching a roadway: Are they wanting to cross the road, will they first pause and look for cars, will they suddenly run, etc.
Mitigation Strategy – Now you must decide what you are going to do about the risk you face: Are you going to keep going and trust that there will be no sudden actions from the source of risk, do you drive on – perhaps for a packet being blown onto the roadway – do you slow down, swerve, brake aggressively, brake and swerve, should you be aware of vehicles behind you? All these options need to be processed.
Action
Now you physically move. You react. You engage. Whether you’re swerving, stopping, braking hard, or carrying on, some time expires as your thoughts and ideas, strategies and analysis, options and mitigation plans, are brought to physical motion. You move your hand, hands, or feet.
Mechanical Reaction
No matter how quickly you react, it also takes some time for the vehicle mechanics to engage and affect the vehicle: The brakes need to bind, the steering effect must redirect the vehicle, etc.
Lastly, you need to consider the stopping distance or swerving distance – how much time, or how much distance at the speed you are moving at, will come into play as you go through the motions of risk mitigation?
The following is a table that you can use to estimate stopping distances for cars, on a variety of surfaces, under full-braking conditions (4-wheel lock-up). On the top, you will see the various kinds of surfaces to consider, below that are ranges of “Drag factor” values that are used to calculate stopping distances on those surfaces, and down the left side is a range of speeds to consider (in Km/h):
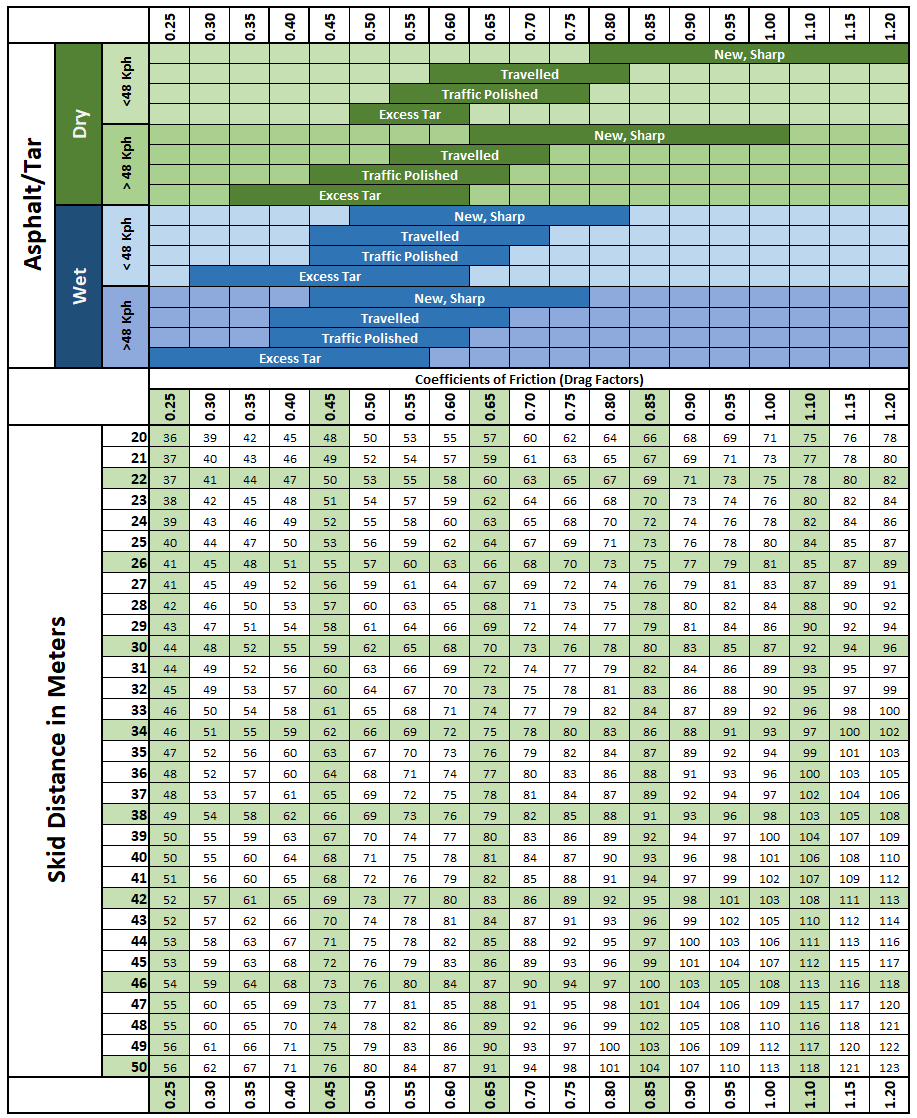
Using this chart as an example, we then know the following:
The Driver in the video was driving at 100 Km/h (this is 27.8 m/s, by the way). At that speed, on a dry Asphalt Road (as it was), that is Traffic Polished (a road that has been there for a long time), we get a drag Factor Range of 0.45 – 0.65. If we go down those columns (under 0.45 and 0.65) and look for the 100Km/h marks, we will see that the stopping distance would have been well above 50 meters (it could have been as much as 80m).
If we compare this to the minimum requirement under the Roade Traffic Act (45m), we can easily see that the lights would only just shine on a low object by the time you are already that far away, at the posted 100 Km/h speed limit.
But if it takes the driver another 1.5 seconds to detect, analyse, and respond to that sand heap, he would have travelled just a bit more than 41m just during that time. This takes the stopping distance all the way to as much as over 100m!
So now the question is this: How can a regular driver be expected to be able to do all this math, just to decide what a “safe speed” is? And what regular driver, a reasonable person, would think “I need to drive at 10 Km/h because there might be a pile of sand strewn across the road?”
This is where mitigation strategies like defensive driving, better headlamp design, HID, LED and even Laser Headlamps, Thermal Cameras and Automated Braking Technologies all become the focus of vehicle safety design, as we have certainly seen.
What is the take-away, from this? It is my opinion that the driver experienced an anomalous sudden emergency, that the roadway was unsafe to use, and that there were no warning signs – even at night. There is nothing this driver could have reasonably done, in my mind, to avoid this horrible incident.
